
Ha preso il via lo scorso primo novembre il progetto AutoNet2030, finanziato in gran parte dall’Unione Europea, che ha l’obiettivo di sperimentare e mettere a punto tecnologie di scambio di informazioni tra veicoli che circolano nella stessa zona, guidati sia manualmente che automaticamente, per rendere il traffico più sicuro.
Il progetto, che durerà tre anni, con conclusione nell’ottobre 2016, vede la partecipazione di nove organizzazioni – costruttori e fornitori automotive, centri di ricerca e fornitori di tecnologie – tra i quali il Centro Ricerche di Fiat a Orbassano (Torino) rappresenta l’Italia. L’orizzonte di riferimento è il periodo 2020-2030, quando ci si aspetta che i sistemi di comunicazione cooperativa e quelli di controllo di bordo (Cruise Control per la velocità, e Lane-Keeping per il mantenimento della corsia di marcia) basati su sensori saranno di serie su gran parte delle automobili.
Indice degli argomenti
Progetto Fiat
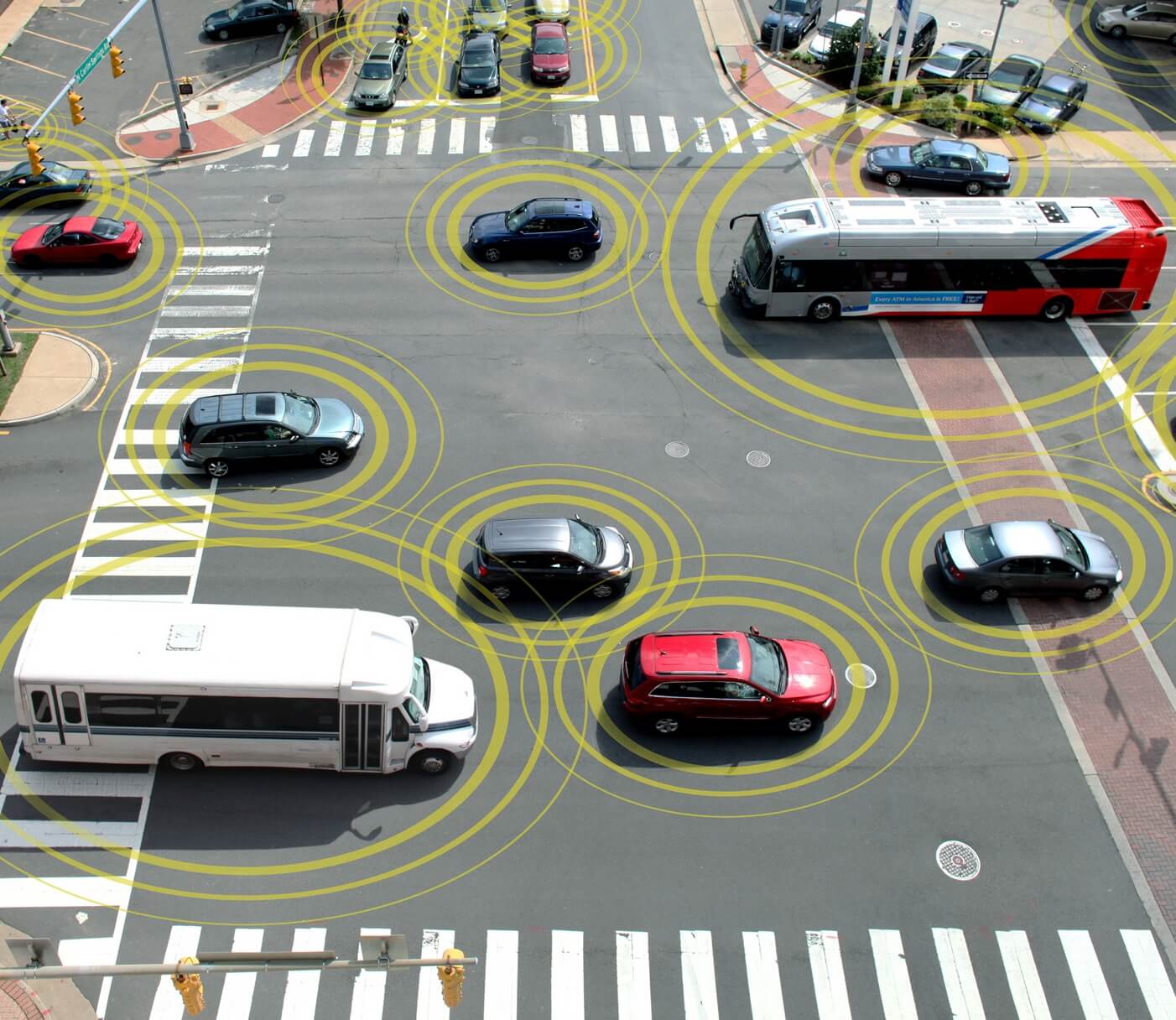
Più in dettaglio, lo scopo del progetto è lavorare all’integrazione tra rilevazioni dei sensori a bordo delle auto, sistemi di controllo di bordo, segnali dei sistemi di navigazione satellitari, e reti di comunicazione wireless tra veicolo e veicolo (cooperativi) e tra veicolo e centrali di controllo del traffico, basati sullo standard sperimentale 802.11p. Questa integrazione è un ingrediente fondamentale per sviluppare sistemi avanzati di guida totalmente automatici, con funzionalità ottimizzate (e nel contempo efficienti in termini di costi), di controllo delle traiettorie, manovre, velocità e interazioni reciproche tra veicoli vicini.
L’idea di fondo è realizzare un sistema decisionale “cooperativo” che utilizza la comunicazione wireless tra gruppi locali di veicoli per scambiare informazioni e definire comandi di manovra (nel caso di veicoli a guida totalmente automatica), o suggerirli su apposite interfacce nei veicoli a guida manuale. Su ogni automobile il sistema di guida sarà a conoscenza delle traiettorie e velocità dei veicoli più vicini, della topografia della strada, degli incroci e dei sensi di marcia, e delle possibili manovre alternative nel caso di eventi inaspettati.
Nel consorzio anche Volvo e Hitachi Europe
Le organizzazioni coinvolte nel consorzio di progetto coprono tutta la classica supply chain dell’automotive, con la slovacca Broadbit nel ruolo di coordinatore e tester della conformità agli standard, Fiat e Volvo in qualità di costruttori, la tedesca BaseLabs come fornitore di framework d’integrazione, Hitachi Europe come fornitore automotive tier-1, e quattro istituti universitari che si occuperanno dello sviluppo degli algoritmi di comunicazione e controllo: Armines (Francia), Ecole Polytechnique Federale de Lausanne (Svizzera), Institute of Communications & Computer Systems (Grecia), e Technical University of Dresden (Germania).
Il sistema prototipale di guida sarà testato dapprima su veicoli a guida automatica a bassa velocità, e poi su autocarri a guida automatica e automobili a guida manuale con suggerimenti provenienti dal sistema cooperativo. I risultati dei test drive saranno poi usati come input di simulazioni con appositi software per verificare il sistema nelle condizioni peggiori, cioè in scenari di traffico intenso e caotico. Il costo del progetto è stimato in 4,59 milioni di euro, di cui 3,35 finanziati dall’Unione Europea, nell’ambito del Seventh Framework Programme, area Co-operative Mobility.














